最終更新日:2021年8月4日
【TOPICS】
- [2021/08/04]FAQにGYモジュール接続についてコメント追加しました。
- [2021/06/17]コラム『ADCサンプリング速度』を追加しました
- [2021/06/05]動作確認プログラムにSleep動作の確認を追加しました
- [2021/06/04]WeActStudioブランドのBluePillは接続しないでください
- [2021/05/28]基本動作確認を別ページに分割しました。
- [2021/03/02]ArduinoIDE2x環境への対応について
- [2021/01/25]M5Staick Sensorモジュールの接続について
- [2021/01/07]BluePillでウオッチドックタイマ(WDT)に掛かる動作確認プログラムを追加しました。
- [2020/04/14]STM32F103の互換CPUの話題を取り上げました。
- [2020/04/06]TOPICS欄を設けました。
更新履歴を追えるような表示を検討し、このような形態にしました。 - [2019/12/25]STM32MINIShield1.0の基板が仕上がった時点でサポートページの開設をしました。
ここではSTM32MINIShield基板1.1の仕様を示します。
【概要】
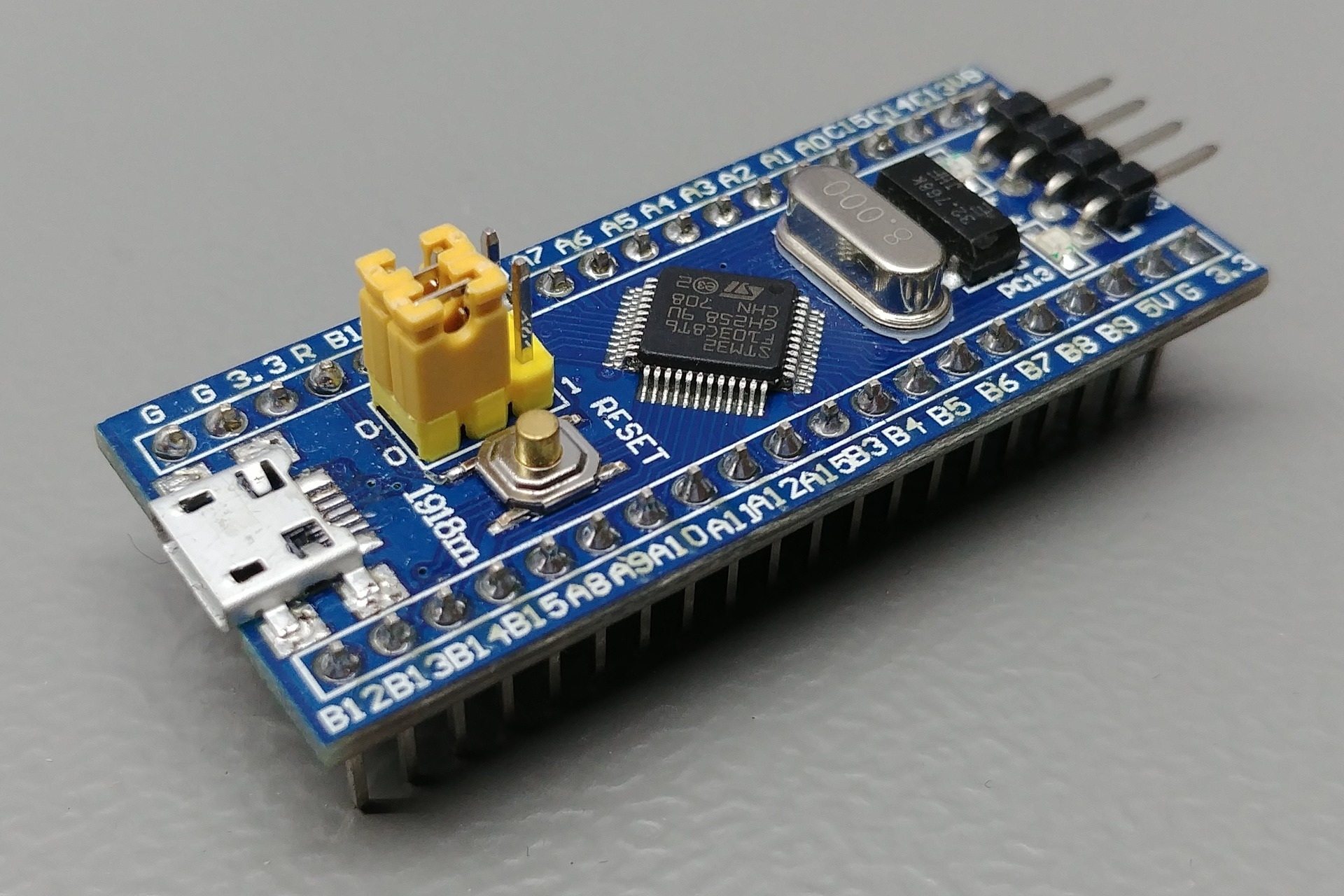
この基板は一般にBluePillと呼ばれている、マイコン:STM32F103C8が搭載された40pinDIP-IC型モジュールに外部モジュールを接続するための基板です。
BluePill用のEtherNetShieldは見当たらないのでNeedsがあるかなと思っています。
直接半田付けしても良いのですが、ソケットを半田付けしておいて差替が出来るように使用する事を想定しています。
この基板に直接接続するモジュールとして想定しているのは以下の通りです。

- BluePillマイコンモジュール(RobotDyn社のSTM32mini推奨)
- WIZ850ioEtherNetモジュール(SPI1及びPA8を占有します。)
- LED&KEY(TM1638)モジュール(PA15,PB3,PB4を占有します。)
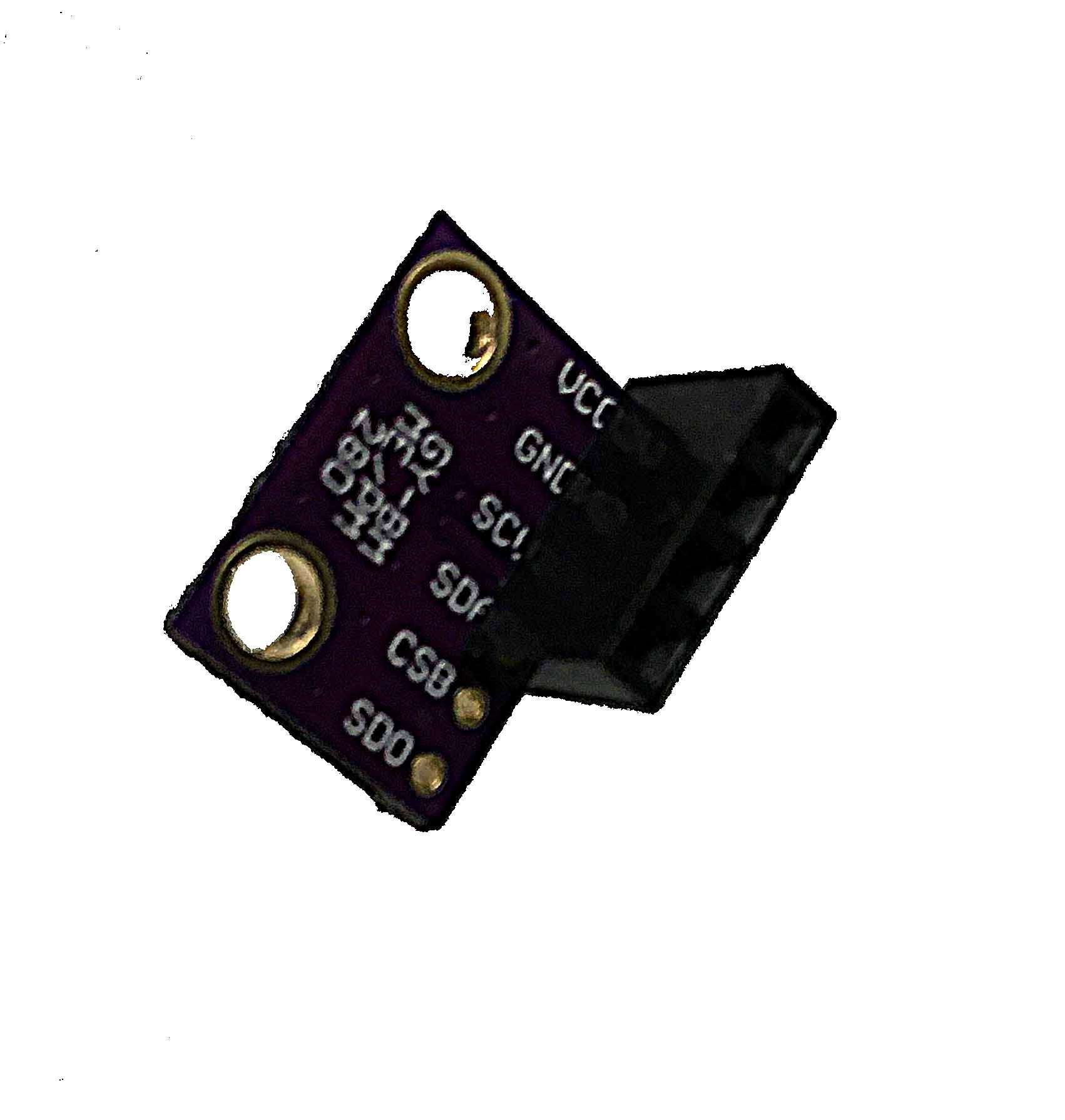
- GYシリーズのI2Cモジュールの一部(pin配置が合致するもので、VCCが3.3V可の物)
- シリアル接続のGPSモジュール
- アナログ出力のモジュールの場合、電源確保のため“ALM_IN”のコネクタが利用できます。
【外観】
| 外観: | 50×80[mm] |
|
| マスク色: | 黒 | |
| 取付穴: | φ3.5、40×70[mm] | |
| 厚み | 1.6[mm] | |
| 基板材質 | FR-4 TG130 | |
| 基板表面処理 | 鉛フリー半田レベラー |
【回路図】 PDF
【実装想定部品一覧】
| 記号 | 名称 | カテゴリ | 数量 | メーカ | 備考 |
| M1 | STM32Mini | MPU | 1 | RobotDyn | BluePill相当品で代用可能 |
| M2 | Wiz850io | NIC | 1 | Wiznet | USR-ES1で代替可能 |
| U1 | 23LC1024 | SRAM | 1 | Microchip | 必要ならば |
| P1 | FH-2x20SG | PinSocket | 1 | Useconn Electronics | 必要ならば |
| P2 | FH-2x20SG | PinSocket | 1 | Useconn Electronics | 必要ならば |
| P3 | FH-1x6SG/RH | PinSocket | 1 | Useconn Electronics | 必要ならば |
| P4 | FH-1x6SG/RH | PinSocket | 1 | Useconn Electronics | 必要ならば |
| CN1 | B4B-XH-A(LF)(SN) | コネクタ | 1 | JST | XH以外のコネクタでも構わない |
| CN2 | B4B-XH-A(LF)(SN) | コネクタ | 1 | JST | XH以外のコネクタでも構わない |
| CN3 | B4B-XH-A(LF)(SN) | コネクタ | 1 | JST | XH以外のコネクタでも構わない |
| CN4 | B6B-XH-A(LF)(SN) | コネクタ | 1 | JST | XH以外のコネクタでも構わない |
| CN5 | B4B-XH-A(LF)(SN) | コネクタ | 1 | JST | XH以外のコネクタでも構わない |
| CN6 | B4B-XH-A(LF)(SN) | コネクタ | 1 | JST | XH以外のコネクタでも構わない |
| CN7 | B5B-XH-A(LF)(SN) | コネクタ | 1 | JST |
XH以外のコネクタでも構わない LED&KEY(TM1638)の接続想定 |
| R1 | MF1/4CC1501F | 抵抗1.5KΩ | 1 | KOA | 互換品 |
| R2 | MF1/4CC1501F | 抵抗1.5KΩ | 1 | KOA | 互換品 |
| R3 | MF1/4CC1002F | 抵抗10KΩ | 1 | KOA | 互換品 |
| R4 | MF1/4CC1002F | 抵抗10KΩ | 1 | KOA | 互換品 |
| R5 | MF1/4CC1002F | 抵抗10KΩ | 1 | KOA | 互換品 |
| R6 | MF1/4CC1002F | 抵抗10KΩ | 1 | KOA | 互換品 |
| R7 | MF1/4CC1002F | 抵抗10KΩ | 1 | KOA | 互換品 |
| R8 | MF1/4CC1002F | 抵抗10KΩ | 1 | KOA | 互換品I2CPullUp 400KHzなら2.2k |
| R9 | MF1/4CC1002F | 抵抗10KΩ | 1 | KOA | 互換品I2CPullUp 400KHzなら2.2k |
| R10 | MF1/4CC1003F | 抵抗100KΩ |
1 |
KOA | 互換品10K~100KΩをメーカ推奨 |
| C1 | RDER72E104K2K1H03B | コンデンサ0.1uF | 1 | muRata | 互換品 |
| SW | SKHHPPA010 | タクトスイッチ | 1 | アルパイン | 互換品 |
| LED1 | OS5RKA3131A | LED(白) | 1 | オプトサプライ | φ3mm |
| LED2 | OS5RKA3131A | LED(青) | 1 | オプトサプライ | φ3mm |
| LEDスペーサ | 2 | φ3mmt2mm | |||
| 基板スペーサ | 4 | φ3.5mmH5mm |
※基板のスペーサですが、サンハヤト・MPS-08が利用できるはずです。オリジナルは北川工業MPS-08-0のはずです。
※USBケーブルですがマイクロBタイプのケーブルが必要です。2A程度は流せるモノをご検討ください。
TOPK Hi-Tensile Micro USB Cableは安価ですが2.4A流せるとありお勧めです。
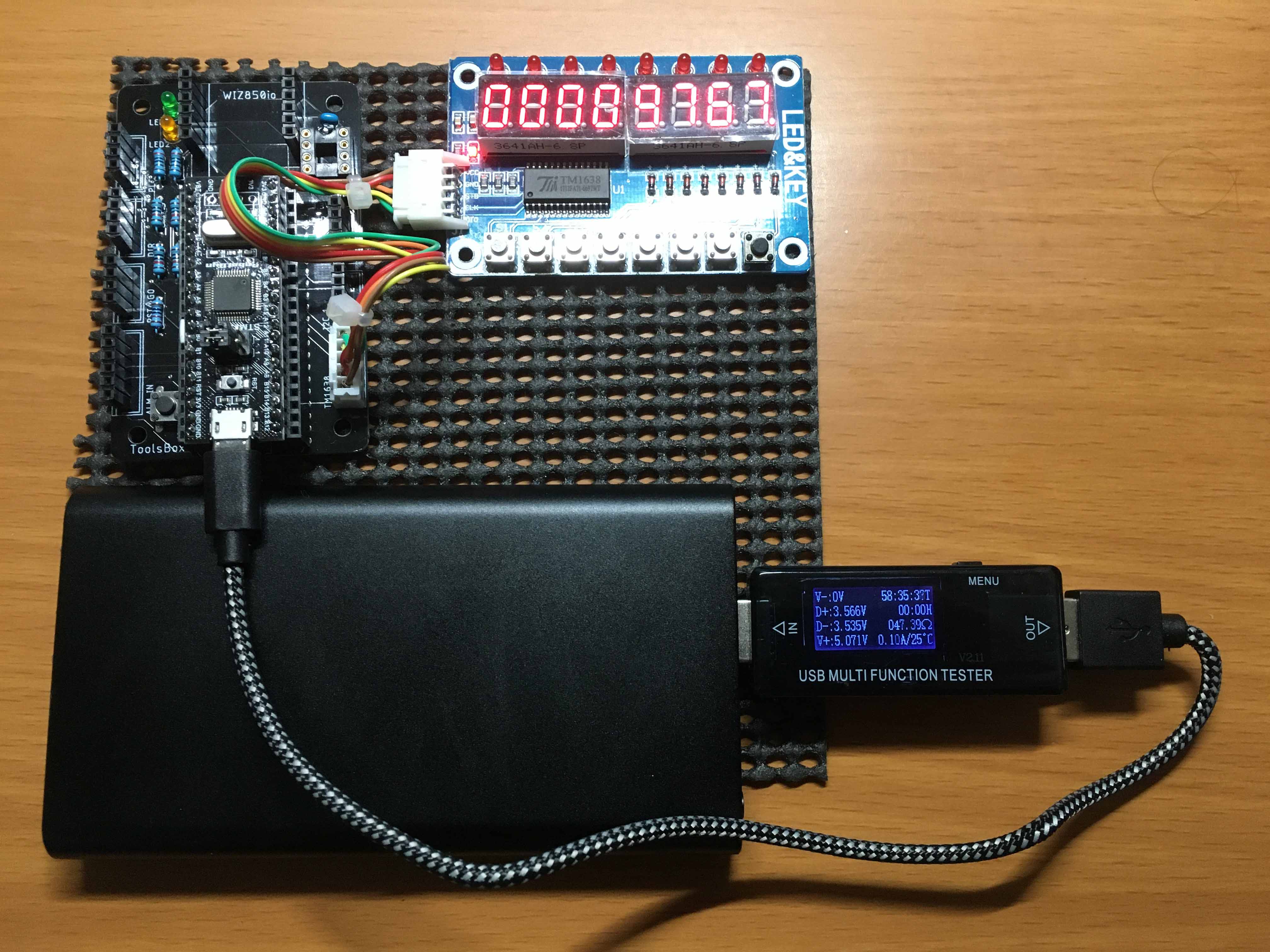
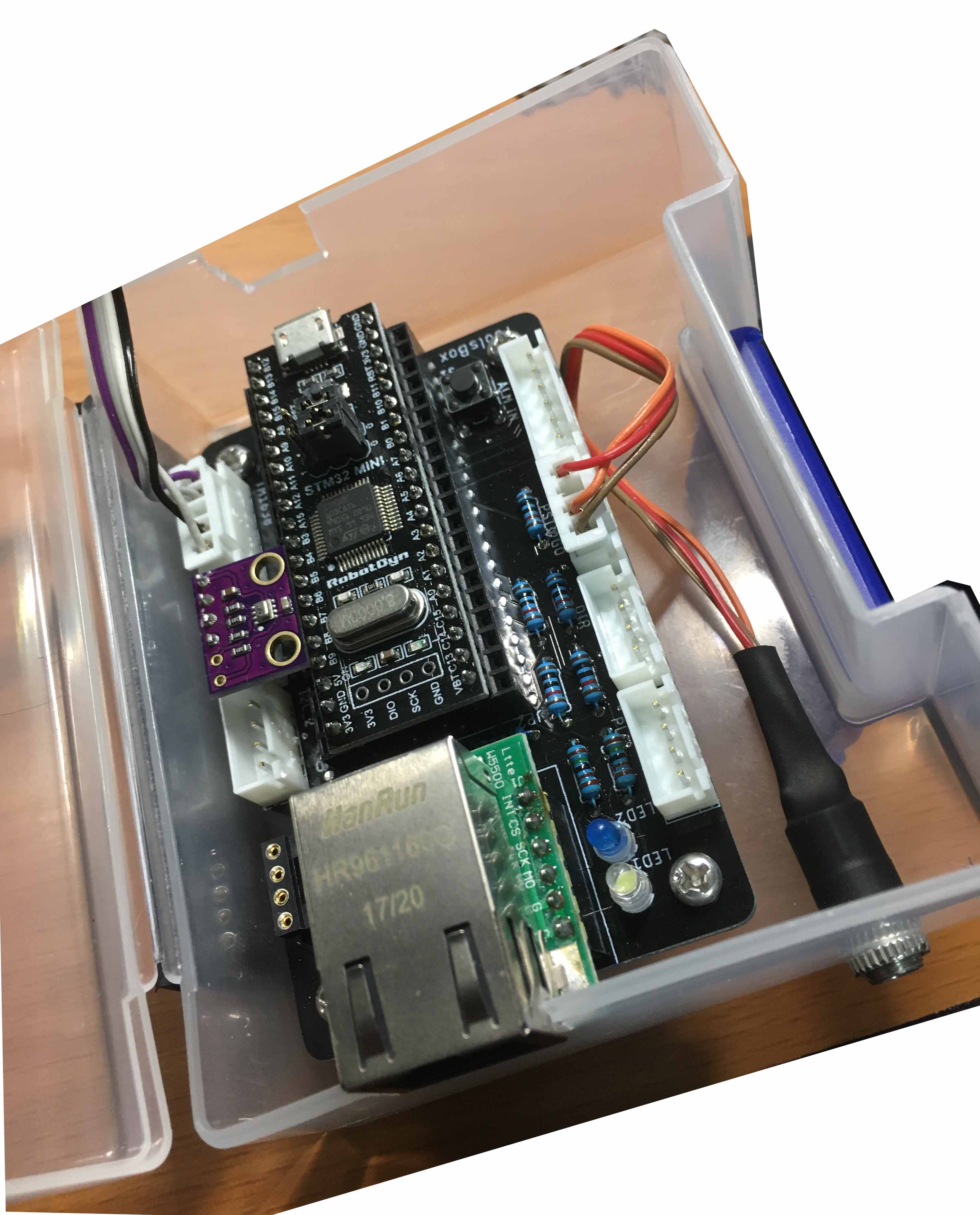
【実装イメージ】
- 組立に際しては半田付けなどでやけどをしないようにしてください。
- Pin圧着等で皮膚を挟み込まないように注意してください。
- 部品は背の低い順に作業を進めることをお勧めします。
- Wiz850ioをソケットを介して接続する場合、外れやすいので、ホットメルト等で接続部を補強してください。
 .jpg) 或いは、敢えてXHのハウジングを使わないで、QIコネクタケーブルを纏めて使うのも在処と思います。   |
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||

【Pinマップ】
ここではArduinoIDE環境で使用することを想定しています。PINマップもその条件に準じています。







{kind=link}