奺婡擻扨懱専徹僾儘僌儔儉傪帵偟偰偍偒傑偡丅
STM32duino娐嫬偑惍偭偨ArduinoIDE偵偰丄怴婯僗働僢僠傪奐偒丄僐乕僪傪僐僺儁偟偰奼挘巕丂ino丂偲偟偰曐懚偟丄Build偟偰偔偩偝偄丅
乵TM1638偺妋擣僐乕僪乶
儔僀僽儔儕偼github偐傜棊偲偟傑偡丅
https://github.com/rjbatista/tm1638-library
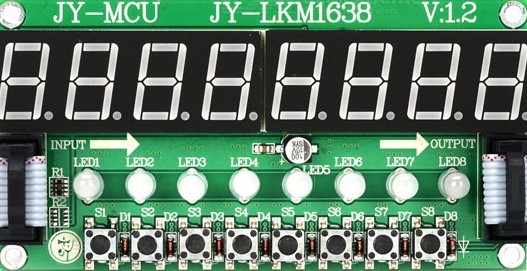
- LED&KEY偺7僙僌LED偵丂1丏2丏3丏4丏A丂B丂C丂D丂偲昞帵偝傟傑偡丅
- 僞僋僩僗僀僢僠傪墴偡偲偦偺埵抲偺LED偑墴偟偰偄傞娫揰摂偟傑偡丅

攝慄偼STM32MINIShield婎斅偺TM1638僐僱僋僞偵LED&KEY傪愙懕偟傑偡丅
婲摦偡傞偲丄
|
LED&KEY偼擖弌椡僨僶僀僗偲偟偰偲偰傕巊偄偲巚偭偰偄傑偡丅chip偼TM-1638偑嵦梡偝傟偰偍傝丄偙偺僠僢僾偑搵嵹偝傟偨儌僕儏乕儖偺僶儕僄乕僔儑儞偼偄偔偮偐偁傝傑偡丅徯夘偟傑偡丅偄偢傟傕丂https://github.com/rjbatista/tm1638-library丂偑巊梡偱偒傞傛偆偱偡丅
| 嘆 |
|
堦斣擖庤梕堈側TM-1638儌僕儏乕儖偩偲巚偄傑偡丅 巊偄傗偡偄儌僕儏乕儖偩偲巚偭偰偄傑偡丅 |
| 嘇 |
|
偙偺儌僕儏乕儖偼愝寁偑屆偄傛偆偱偡丅擖庤崲擄偱偡丅 |
| 嘊 |
|
JY-LKM1638 峸擖愭偑尷傜傟傑偡偑丄儌僕儏乕儖楢寢偑弌棃傞偨傔桳梡偱偡丅崅偄偺偑擄揰偐500墌偱偼攦偊側偄偱偡丅 |
| 嘋 |
|
QYF-TM1638 擖椡儃僞儞偑16偁傝丄埨壙側偺偑偆傟偟偄偱偡丅200墌埲壓丅 |
| 嘍 |

|
7僙僌LED偺傒偺昞帵偵尷偭偰偄傑偡丅楢寢偱偒傞偺偱巊偄摴偼偁傝傑偡丅 |
| 嘐 |
|
TM1638偼嵟戝24(8亊3)屄偺愙揰擖椡偑弌棃傞偲桳傝傑偡丅 栚堦攖媗傔崬傫偩儌僕儏乕儖側偺偱偡偑擖庤愭偑尒摉偨傝傑偣傫丅 |
乵TSL2561(I2C)偺妋擣僐乕僪乶
儊乕僇僒僀僩偵儔僀僽儔儕偑巆偭偰偄傑偣傫偺偱github偐傜棊偲偟傑偡丅
https://github.com/sparkfun/SparkFun_TSL2561_Arduino_Library

攝慄偼STM32MINIShield婎斅偺I2C僐僱僋僞偵GY-2561傪愙懕偟傑偡丅
幚峴寢壥偼僔儕傾儖儌僯僞偵徠搙抣偑僾儘僢僩偝傟傑偡丅
|
乵MAX44009(I2C)偺妋擣僐乕僪乶
傕偭偲扨弮側徠搙僙儞僒偑桳傝傑偡丅MAX44009偱偡丅GY-49偲偟偰儌僕儏乕儖偑採嫙偝傟偰偄傑偡丅
Arduino Library List偵儔僀僽儔儕偑桳傝傑偡丅偙偺僐乕僪偱偦偺傑傑巊偊傞條偱偡丅
https://www.arduinolibraries.info/libraries/max44009-library攝慄偼STM32MINIShield婎斅偺I2C僐僱僋僞偵GY-49傪愙懕偟傑偡丅

幚峴寢壥偼僔儕傾儖儌僯僞偵徠搙抣偑僾儘僢僩偝傟傑偡丅TSL2561偺抣偲斾妑偡傞偺傕柺敀偄偱偡丅
|
乵SHT21(I2C)偺妋擣僐乕僪乶
儊乕僇僒僀僩偵儔僀僽儔儕偑巆偭偰偄傞傛偆偱偡偑丄github偐傜棊偲偟偨傎偆偑丄妋幚偺傛偆偱偡丅
https://github.com/adafruit/Adafruit_HTU21DF_Library攝慄偼STM32MINIShield婎斅偺I2C僐僱僋僞偵GY-21傪愙懕偟傑偡丅

幚峴寢壥偼僔儕傾儖儌僯僞偵壏搙抣丒幖搙抣偑僾儘僢僩偝傟傑偡丅嬤偔偺壏搙寁偺抣偲斾妑偟偰偔偩偝偄丅
|
乵幚憰LED偺妋擣僐乕僪乶
僞僀儅妱崬傪巊梡偟偰1昩揰摂1昩徚摂偺孞傝曉偟傪幚巤偟傑偡丅
STM32MINIShield婎斅偵偼LED1/LED2偺2偮偺LED偑幚憰弌棃傑偡丅妱摉億乕僩偼PB8/PB9偱偡丅
- 妱崬傪0.1msec偱敪惗偝偣丄僇僂儞僩傪婲摦偟傑偡丅
- 3000僇僂儞僩偺帪偵LED1偵Event傪敪惗偝偣傑偡丅
- 6000僇僂儞僩偺帪偵LED2偵Event傪敪惗偝偣傑偡丅
- 僇僂儞僞偼10000偱僇僂儞僩傾僢僾偟傑偡丅
- Event傪庴偗偨LED偼揰摂徚摂傪孞傝曉偟傑偡丅
|
乵ADC偺妋擣僐乕僪_1乶
4ch偺崅懍庢崬椺傪帵偟傑偡丅
昗弨憰旛儔僀僽儔儕STM32ADC傪僐乕儖偟偰偄傑偡丅愙懕椺

|
乵ADC偺妋擣僐乕僪_2乶
僞僀儅妱崬傪巊梡偟偰4ch傪10[S/s]偱楢懕廤榐偡傞僾儘僌儔儉傪幚憰偟傑偡丅
LabVIEW偱婰弎偟偨PC懁僜僼僩偐傜LAN宱桼偱愙懕偟偰僨乕僞廂榐奐巒廔椆傪幚尰偟傑偡丅PC僜僼僩側偺偱僌儔僼壔偟偰昞帵偟傑偡丅
僞僀儅妱崬偼Arduino偺僐乕僪偺傑傑偱偼摦偐側偄晹暘偑偁傝傑偡丅
僱僢僩儚乕僋僾儘僩僐儖偼TCP僜働僢僩捠怣偲偟傑偡丅僜働僢僩斣崋偼50001偲偟偰偄傑偡丅愙懕椺

寢壥偼LabVIEW僷僱儖偵昞帵偟傑偡丅
僜働僢僩捠怣偼撈帺僾儘僩僐儖傪寛傔偰偐傜峔抸偡傞昁梫偑偁傝傑偡丅傑偨丄LabVIEW懁偐傜偡傞偲僨乕僞庴怣偱偡偑丄堦曽揑側僨乕僞庴怣偵偡傞偺偱偁傟偽UDP偵偟側偄偲悅傟棳偟偵偼弌棃傑偣傫丅僄儔乕56偑敪惗偟偰偟傑偆偱偟傚偆丅僨乕僞庴怣僽儘僢僋枅偵壗傜偐偺墳摎傪偡傞傛偆側僾儘僩僐儖傪惂掕偟偰偍偔昁梫偑偁傝傑偡丅
|
乵SRAM偺妋擣僐乕僪乶
偙偺儃乕僪偵偼SPI愙懕偺僔儕傾儖SRAM丗23LC1024偑幚憰弌棃傞傛偆偵偟偰偄傑偡丅摿偵幚憰偡傞昁梫偼側偄偱偡丅
偨偩丄幚憰壜擻側偺偱摦嶌妋擣偩偗偼弌棃傞傛偆偵偟偰偍偒傑偡丅
巊梡偡傞儔僀僽儔儕偼丄SpiRam_Extended傪巊梡偟傑偡丅
https://github.com/dmason1992/SpiRam_Extended

乵BME280(I2C)偺妋擣僐乕僪乶
婥埑偺寁應偡傞応崌偺僙儞僒偲偟偰BME280偼曋棙偱偡丅壏搙丒幖搙傕摨帪偵寁應偟丄婥埑抣偵懳偟偰曗惓傪妡偗傞帠偑弌棃傑偡丅偲塢偆帠偱丄堦墳専徹偟偰偍偒傑偡丅仸I2C側偺偱Arduino偺儔僀僽儔儕偱傕晛捠偵摦偔偼偢偱偡偑丄丄丄
https://github.com/finitespace/BME280/blob/master/src/BME280I2C.h

|
乵DS3231(I2C)偺妋擣僐乕僪乶
STM32F103偵偼RTC婡擻偑搵嵹偝傟偰偄傞偺偱偡偑丄惛搙偑埆偄偲巚偭偰偄傑偡丅斾妑揑埨掕偟偰偄傞DS3231傪BluePill偱巊偊傞偐偳偆偐偺妋擣傪偟偰偍偒傑偡丅
暥帤楍傪埖偆偨傔丄埨堈偵儔僀僽儔儕偑偦偺傑傑巊偊傞偲偼峫偊偵偔偄偱偡丅
adafruit/RTClib傪妋擣偟偨偲偙傠丄摦偒傑偟偨丅
https://github.com/adafruit/RTClib
仸DS3231傪搵嵹偟偨儌僕儏乕儖偼偄偔偮偐偁傝傑偡丅崱夞偼EEPROM偑搵嵹偝傟偰偄側偄亀DS3231ForPi亁偱摦嶌妋擣偟傑偟偨丅

|
乵夞揮懍搙偺寁應妋擣僐乕僪乶
晽岦傗晽懍偺寁應偺偨傔偵僷儖僗擖椡傪尦偵夞揮懍搙傪寁應偡傞弍傪妋擣偟偰偍偒傑偡丅
晽懍偼晽幵偺堦掕帪娫偺夞揮悢傪寁應偡傞偙偲偱媮傔傞帠偑弌棃傞偐偲巚偄傑偡丅埥偄偼丄壒攇偑嬻拞傪揱斃偡傞偲偒偵偦偺懍搙偑晽懍偵傛偭偰曄壔偡傞偙偲傪棙梡偟偰挻壒攇偺揱斃帪娫傪應掕偡傞曽朄傕偁傞偐偲巚偄傑偡丅
晽岦偼悂偒棳偟偼堦斒側偺偱偟傚偆偑丄揹婥揑側抣偲偟偰庢傝弌偣側偄偱偡丅嵟戝晽懍偑摼傜傟傞妏搙傪僒乕儃偐傜揹埑抣偱偁傞曽朄偩偭偨傝丄億僥儞僔儑儊乕僞偱夞揮妏傪媮傔傞偺傕壜擻偱偡丅挻壒攇僙儞僒傪3偮惓嶰妏宍偵攝抲偟偰帪暘妱憲庴怣偱晽岦敾抐偡傞偙偲傕弌棃偦偆偱偡丅偙偙偱偼夞揮妏偼偝偰偍偄偰夞揮懍搙偺寁應傪妋擣偡傞僐乕僪傪抲偄偰偍偒傑偡丅
奜晹偵夞揮悢偑曄壔壜擻側僨僶僀僗偑偁傟偽偄偄偺偱偡偑丄僥僗僩側偺偱丄BluePill帺恎偑摿掕偺僷儖僗傪弌椡偟丄偦傟傪怣崋擖椡偟偰僇僂儞僩傾僢僾丄堦掕帪娫枅偵僇僂儞僞抣傪昞帵偡傞偲偄偆暔偱偡丅

|
僷儖僗僇僂儞僞偺惛搙偼壜惉傝崅偄偲峫偊傑偡丅堦曽PWM偱嶌惉偟偨専徹梡僷儖僗偼惛搙偑埆偄偱偡丅10KHz傪愝掕偟偰傕9.85KHz掱搙偵側傝傑偡丅偦偙偱丄奜晹偵FG傪梡堄偟偰擖椡偟偰傒傑偟偨丅偦偺僇僂儞僞偺惛搙偼廫暘偲峫偊傑偡丅
FG偲偟偰AD2偲梡堄偟偰10KHz傪弌椡偟丄僇僂儞僞擖椡偟偰傒偨偺偱偡偑丄亀10000亁偲昞帵偝傟傑偟偨丅
仸AD2偱嬮宍攇Amp1Voffset1V偵偡傞偙偲偱0-2V偺嬮宍攇傪弌椡弌棃傑偡丅
仸AD2偵偰1MHz偺弌椡傪妡偗偨偲偙傠丄傎傏亀1000000亁偲昞帵偝傟傑偟偨丅偲偙傠偑丄2MHz偲偟偰傕亀1000000亁偱偡丅偙偺偙偲偐傜丄#define TIMER_DIV 72丂偑塭嬁偟偰偄傞偺偐傕偟傟傑偣傫丅
乵悈検/棳悈懍搙偺寁應妋擣僐乕僪乶
婥徾娤應偺梫慺偵偼塉検偑偁傝傑偡丅堦墳曽朄榑傪尦偵専徹僾儘僌儔儉傪専摙偟傑偡丅
塉検寁應偼Wikipedia偵傛傞偲丄挋悈宆塉検寁丄揮搢傑偡宆塉検寁偑桳傞偦偆偱偡丅婥徾嬈柋朄偺敍傝偑偁傝傛偆偱偡丅
儗乕僟乕偵傛傞塉検寁應曽朄傕偁傞傛偆偱偡偑丄偙偪傜偼婯柾揑側栤戣偑偁傝傑偡丅
娙堈揑側塉検寁應傪峫偊傞偲暘夝擻0.5mm偐0.2mm偐偱庤朄傪専摙偟偨曽偑椙偝偦偆偱偡丅
MISOL幮偑採嫙偡傞WH-SP-RG偲偄偆晹昳偑\2500掱搙偱採嫙偝傟偰偄傑偡丅弌椡怣崋偵偮偄偰偺徻嵶偼敾偭偰偄傑偣傫偑丄0.3mm枅偵僷儖僗僇僂儞僩偝傟傞偲偄偆偙偲偼敾偭偰偄傑偡丅
擔杮偱偼24帪娫塉検偱922.5mm偑嵟戝偲偺忣曬偑偁傝丄偦偆偡傞偲24亊60/(922.5/0.3)佮5.2[min/夞]偲側傝丄偙偺寁悢偼偡偛偔娫妘偑嬻偔偙偲偑憐憸偱偒傑偡丅戝塉偺応崌偺忣曬偲偟偰10暘娫塉検偲偄偆偺偑偁傝丄嵟戝娤應抣偑50mm偲側偭偰偄傑偡丅仸婥徾挕忣曬丂10/乮50/0.3乯佮0.67[min/夞]偲側傝丄偙偺応崌偱傕僇僂儞僩僀儞僞乕僶儖偑40昩傕偁傝傑偡丅偲側傞偲1暘娫偺僇僂儞僩抣傪夁嫀1擔暘愊嶼偱偒傞傛偆1440價儞傪梡堄偟偰丄1暘偛偲偵巜掕偝傟偨價儞偵僇僂儞僩抣傪擖椡偟偰丄夁嫀1440屄偺價儞傪崌寁偟偰塉検昞帵偡傟偽椙偝偦偆偱偡丅
仸Byte丂bin[1440]丂偱1440Byte妋曐偡傞昁梫偑偁傞傢偗偱丄側傫偲偐妋曐弌棃傞僒僀僘偱偡丅
 |
|
乵NTP傪棙梡偟偨帪寁乶
NIC傪棙梡偟偨妋擣僾儘僌儔儉傕婔偮偐梡堄偟傑偡丅
傑偢偼TM1638偲愙懕偟丄婲摦偡傞偲僀儞僞乕僱僢僩偵傾僋僙僗偟偰僱僢僩僞僀儉僾儘僩僐儖(ntp)偵偰帪崗庢摼傪偟丄帪寁傪僗僞乕僩丅1擔枅偵帪寁帪崗崌傢偣傪偡傞偲偄偆僒儞僾儖僗働僢僠傪専摙偟傑偟偨丅
DHCP偱儖乕僞偐傜IP傾僪儗僗傪庢摼偡傞僒儞僾儖偱傕偁傝傑偡丅MAC傾僪儗僗偑廳梫偱偡丅
|