最終更新日:2021/5/27

流量を制御しながらモニタ出来る計器として上記の様なフローセンサが有ります。これはこれで重要なセンサですが、Arduinoに取り込むことが考慮されていません。Arduinoでデータを取り込む事を前提としたセンサについて調査しました。
流用センサは機械的なモノ、ホールセンサのようなもの、気体のみ、液体のみ等々制限が多いです。
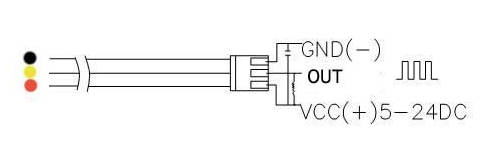
基本パルス出力なので、流量が低いと一定時間内にパルスが発生しません。精度が気になるところですね
機械部には![]() のアイコンが付いているモノが殆どです。台湾の中江紅流量傳感器の製品をOEMで使っているのかなと思われます。
のアイコンが付いているモノが殆どです。台湾の中江紅流量傳感器の製品をOEMで使っているのかなと思われます。
南アフリカのマイクロロボティクスと云うお店はYF_S401のデータシートを提供していました。
DFROBOT・SEN0217の場合 450パルス/1L/min と云う情報があります。最低流量の1LPMの場合で、1秒間に7.5パルスしか出力されません。